Ультразвуковой дальномер на микроконтроллере. Самодельный фазовый лазерный дальномер
Ультразвуковые датчики расстояния Ардуино очень востребованы в робототехнических проектах из-за своей относительной простоты, достаточной точности и доступности. Они могут быть использованы как приборы, помогающие объезжать препятствия, получать размеры предметов, моделировать карту помещения и сигнализировать о приближении или удалении объектов. Одним из распространенных вариантов такого устройства является датчик расстояния, в конструкцию которого входит ультразвуковой дальномер HC SR04. В этой статье мы познакомимся с принципом действия датчика расстояния, рассмотрим несколько вариантов подключения к платам Arduino, схему взаимодействия и примеры скетчей.
Способность ультразвукового датчика определять расстояние до объекта основано на принципе сонара – посылая пучок ультразвука, и получая его отражение с задержкой, устройство определяет наличие объектов и расстояние до них. Ультразвуковые сигналы, генерируемые приемником, отражаясь от препятствия, возвращаются к нему через определенный промежуток времени. Именно этот временной интервал становится характеристикой помогающей определить расстояние до объекта.
Внимание! Так как в основу принципа действия положен ультразвук, то такой датчик не подходит для определения расстояния до звукопоглощающих объектов. Оптимальными для измерения являются предметы с ровной гладкой поверхностью.
Описание датчика HC SR04
Датчик расстояния Ардуино является прибором бесконтактного типа, и обеспечивает высокоточное измерение и стабильность. Диапазон дальности его измерения составляет от 2 до 400 см. На его работу не оказывает существенного воздействия электромагнитные излучения и солнечная энергия. В комплект модуля с HC SR04 arduino также входят ресивер и трансмиттер.
Ультразвуковой дальномер HC SR04 имеет такие технические параметры:
- Питающее напряжение 5В;
- Рабочий параметр силы т ока – 15 мА;
- Сила тока в пассивном состоянии < 2 мА;
- Обзорный угол – 15°;
- Сенсорное разрешение – 0,3 см;
- Измерительный угол – 30°;
- Ширина импульса – 10 -6 с.

Датчик оснащен четырьмя выводами (стандарт 2, 54 мм):
- Контакт питания положительного типа – +5В;
- Trig (Т) – выход сигнала входа;
- Echo (R) – вывод сигнала выхода;
- GND – вывод «Земля».
Где купить модуль SR04 для Ардуино
Датчик расстояния – достаточно распространенный компонент и его без труда можно найти в интернет-магазинах. Самые дешевые варианты (от 40-60 рублей за штуку), традиционно на всем известном сайте.
 Модуль датчика расстояния HC-SR04 для Ардуино Модуль датчика расстояния HC-SR04 для Ардуино
|
 Еще один вариант ультразвукового сенсора HC-SR04 у надежного поставщика Еще один вариант ультразвукового сенсора HC-SR04 у надежного поставщика
|
 Датчики расстояния SR05 Ultrasonic HC-SR05 (улучшенные характеристики) Датчики расстояния SR05 Ultrasonic HC-SR05 (улучшенные характеристики)
|
 Модуль HC-SR05 HY-SRF05 для UNO R3 MEGA2560 DUE от надежного поставщика Модуль HC-SR05 HY-SRF05 для UNO R3 MEGA2560 DUE от надежного поставщика
|
Схема взаимодействия с Arduino
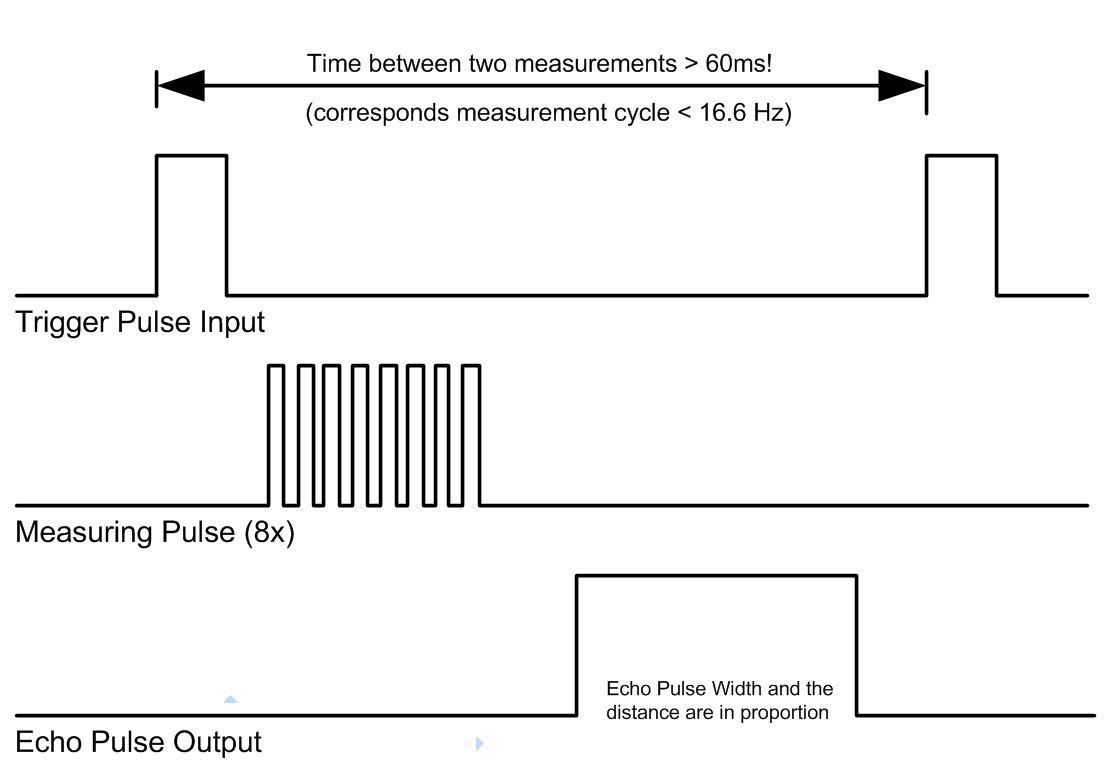
Для получения данных, необходимо выполнить такую последовательность действий:
- Подать на выход Trig импульс длительностью 10 микросек;
- В ультразвуковом дальномере hc sr04 подключенном к arduino произойдет преобразование сигнала в 8 импульсов с частотой 40 кГц, которые через излучатель будут посланы вперед;
- Когда импульсы дойдут до препятствия, они отразятся от него и будут приняты приемником R, что обеспечит наличие входного сигнала на выходе Echo;
- На стороне контроллера полученный сигнал при помощи формул следует перевести в расстояние.
При делении ширины импульса на 58.2, получим данные в сантиметрах, при делении на 148 – в дюймах.
Подключение HC SR04 к Arduino
Выполнить подключение ультразвукового датчика расстояния к плате Arduino достаточно просто. Схема подключения показана на рисунке.

Контакт земли подключаем к выводу GND на плате Arduino, выход питания соединяем с 5V. Выходы Trig и Echo подсоединяем к arduino на цифровые пины. Вариант подключения с помощью макетной платы:

Библиотека для работы с HC SR04
Для облегчения работы с датчиком расстояния HC SR04 на arduino можно использовать библиотеку NewPing. Она не имеет проблем с пинговыми доступами и добавляет некоторые новые функции.
К особенностям библиотеки можно отнести:
- Возможность работы с различными ультразвуковыми датчиками;
- Может работать с датчиком расстояния всего через один пин;
- Отсутствие отставания на 1 секунду при отсутствии пинга эха;
- Для простой коррекции ошибок есть встроенный цифровой фильтр;
- Максимально точный расчет расстояния.
Скачать бибилотеку NewPing можно
Точность измерения расстояния датчиком HC SR04
Точность датчика зависит от нескольких факторов:
- температуры и влажности воздуха;
- расстояния до объекта;
- расположения относительно датчика (согласно диаграммы излучения);
- качества исполнения элементов модуля датчика.
В основу принципа действия любого ультразвукового датчика заложено явление отражения акустических волн, распространяющихся в воздухе. Но как известно из курса физики, скорость распространения звука в воздухе зависит от свойств этого самого воздуха (в первую очередь от температуры). Датчик же, испуская волны и замеряя время до их возврата, не догадывается, в какой именно среде они будут распространяться и берет для расчетов некоторую среднюю величину. В реальных условиях из-за фактора температуры воздуха HC-SR04 может ошибаться от 1 до 3-5 см.
Фактор расстояния до объекта важен, т.к. растет вероятность отражения от соседних предметов, к тому же и сам сигнал затухает с расстоянием.
Также для повышения точности надо правильно направить датчик: сделать так, чтобы предмет был в рамках конуса диаграммы направленности. Проще говоря, “глазки” HC-SR04 должны смотреть прямо на предмет.
Для уменьшения ошибок и погрешности измерений обычно выполняются следующие действия:
- усредняются значения (несколько раз замеряем, убираем всплески, потом находим среднее);
- с помощью датчиков (например, ) определяется температура и вносятся поправочные коэффициенты;
- датчик устанавливается на серводвигатель, с помощью которого мы “поворачиваем голову”, перемещая диаграмму направленности влево или вправо.
Примеры использования датчика расстояния
Давайте рассмотрим пример простого проекта с платой Arduino Uno и датчиком расстояния HC SR04. В скетче мы будем получать значение расстояния до предметов и выводить их в монитор порта в среде Arduino IDE. Вы сможете легко изменить скетч и схему подключения, чтобы датчик сигнализировал о приближении или отдалении предмета.
Подключение датчика к ардуино
При написании скетча использовалась следующий вариант распиновки подключения датчика:
- VCC: +5V
- Trig – 12 пин
- Echo – 11 пин
- Земля (GND) – Земля (GND)
Пример скетча
Начнем работу с датчиком сразу с относительного сложного варианта – без использования внешних библиотек.
В данном скетче мы выполняем такую последовательность действий:
- Коротким импульсом (2-5 микросекунды) переводим датчик расстояния в режим эхолокации, при котором в окружающее пространство высылаются ультразвуковые волны с частотой 40 КГц.
- Ждем, пока датчик проанализирует отраженные сигналы и по задержке определит расстояние.
- Получаем значение расстояния. Для этого ждем, пока HC SR04 выдаст на входе ECHO импульс, пропорциональный расстоянию. Мы определяем длительность импульса с помощью функции pulseIn, которая вернет нам время, прошедшее до изменения уровня сигнала (в нашем случае, до появления обратного фронта импульса).
- Получив время, мы переводим его в расстояние в сантиметрах путем деления значения на константу (для датчика SR04 это 29.1 для сигнала «туда», столько же для сигнала «обратно», что в сумме даст 58.2).
Если датчик расстояния не выполняет считывание сигнала, то преобразование выходного сигнала никогда не примет значения короткого импульса – LOW. Так как у некоторых датчиков время задержки варьируется в зависимости от производителя, рекомендуется при использовании указанных скетчей выставлять его значение вручную (мы это делаем в начале цикла).
Если расстояние составляет более 3 метров, при котором HC SR04 начинает плохо работать, время задержки лучше выставлять более 20 мс, т.е. 25 или 30 мс.
#define PIN_TRIG 12 #define PIN_ECHO 11 long duration, cm; void setup() { // Инициализируем взаимодействие по последовательному порту Serial.begin (9600); //Определяем вводы и выводы pinMode(PIN_TRIG, OUTPUT); pinMode(PIN_ECHO, INPUT); } void loop() { // Сначала генерируем короткий импульс длительностью 2-5 микросекунд. digitalWrite(PIN_TRIG, LOW); delayMicroseconds(5); digitalWrite(PIN_TRIG, HIGH); // Выставив высокий уровень сигнала, ждем около 10 микросекунд. В этот момент датчик будет посылать сигналы с частотой 40 КГц. delayMicroseconds(10); digitalWrite(PIN_TRIG, LOW); // Время задержки акустического сигнала на эхолокаторе. duration = pulseIn(PIN_ECHO, HIGH); // Теперь осталось преобразовать время в расстояние cm = (duration / 2) / 29.1; Serial.print("Расстояние до объекта: "); Serial.print(cm); Serial.println(" см."); // Задержка между измерениями для корректной работы скеча delay(250); }
Скетч с использованием библиотеки NewPing
Теперь давайте рассмотрим вариант скетча с использованием библиотеки NewPing. Код существенно упростится, т.к. все описанные ранее действия спрятаны внутри библиотеки. Все, что нам нужно сделать – создать объект класса NewPing, указав пины, с помощью которых мы подключаем датчик расстояния и использовать методы объекта. В нашем примере для получения расстояния в сантиметрах нужно использовать ping_cm().
#include
Пример подключения ультразвукового дальномера HC SR04 с одним пином
Подключение HC-SR04 к Arduino может быть выполнено посредством использования одного пина. Такой вариант пригодится, если вы работаете с большим проектом и вам не хватает свободных пинов. Для подключения вам нужно просто установить между контактами TRIGи ECHO резистор номиналом 2.2K и подключить к ардуино контакт TRIG.
#include
Краткие выводы
Ультразвуковые датчики расстояния достаточно универсальны и точны, что позволяет их использовать для большинства любительских проектов. В статье рассмотрен крайне популярный датчик HC SR04, который легко подключается к плате ардуино (для этого следует сразу предусмотреть два свободных пина, но есть вариант подключения и с одним пином). Для работы с датчиком существуют несколько бесплатных библиотек (в статье рассмотрена лишь одна из них, NewPing), но можно обойтись и без них – алгоритм взаимодействия с внутренним контроллером датчика достаточно прост, мы показали его в этой статье.
Исходя из собственного опыта, можно утверждать, что датчик HC-SR04 показывает точность в пределах одного сантиметра на расстояниях от 10 см до 2 м. На более коротких и дальних дистанциях возможно появление сильных помех, что сильно зависит от окружающих предметов и способа использования. Но в большинстве случаев HC-SR04 отлично справлялся со своей работой.
Этот прибор, который до сих пор считается уникальным, смог найти применение практически во всех сферах человеческой жизни. Сегодня лазерный дальномер можно увидеть в руках геологов и геодезистов. Иными словами, в тех областях человеческой деятельности, где необходимо замерить расстояние с особой точностью. Поэтому высокую популярность завоевали лазерные рулетки, отличающиеся высокой точностью, повышенной надежностью и вполне доступной ценой. Вполне естественно звучит вопрос, можно ли сделать дальномер лазерный своими руками.
К группе приборов, которые измеряют расстояние при помощи электроники, относятся: лазерный дальномер, ультразвуковой дальномер.
Измерения лазерным дальномером делаются на основе световых потоков, носителем сигнала является электромагнитное излучение, окрашенное в соответствующий оттенок. В большинстве случаев за основу берется красный свет.
Согласно законам физики, скорость света намного превышает скорость звука, поэтому и время измерения одинакового расстояния будет отличаться.
Основные причины для монтажа лазерного дальномера

Пользоваться механической рулеткой не всегда удобно. Порой она не дает положительного эффекта. В последние 10 лет все большее предпочтение отдается электронным дальномерам. К этой группе приборов, которые измеряют расстояние при помощи электроники, относятся:
- лазерный дальномер;
- ультразвуковой дальномер.
Все эти приборы функционируют по принципу бесконтактного метода. Такой дальномер своими руками сегодня создают отечественные мастера. Приборы работают не хуже тех, которые были выпущены в заводских условиях.
Лазерный дальномер, сделанный своими руками, состоит из нескольких частей:
- плата;
- микроконтроллер;
- усилитель лазерного сигнала;
- лазер;
- фотоприемник;
- фильтр.
В основном излучение лазера возникает при помощи синусоидального сигнала.
Довольно сложно получить такой сигнал, имеющий частоту 10 МГц. Простой контроллер здесь не подходит. Для этого лучше использовать меандр, у которого имеется нужная частота. Когда усиливается сигнал, приходящий из фотоприемника, удаляются ненужные гармоники специальным полосовым фильтром, который функционирует на частоте 10 МГц. На выходе появляется сигнал, сильно напоминающий синусоидальный.
Вернуться к оглавлению

Чтобы изготовить дальномер своими руками можно за основу взять схему лазерной связи. В данном случае передача данных происходит очень быстро, скорость равна 10 Мбит. Такая величина соответствует имеющейся частоте модуляции.
Для такого лазерного устройства берется самый простой усилитель мощности. Он состоит из одной микросхемы 74HC04, которая собрана из шести инверторов. Подача тока ограничивается специальными резисторами. Однако умельцы могут заменить резисторы более надежными деталями.
Пусконаладочная плата становится источником 5-вольтового напряжения. Таким образом усилитель получает питание. Чтобы убрать наводки сигнала на другую часть электрической схемы, усилительный корпус делается стальным, каждый провод экранируется.
В качестве лазера выступает привод, установленный в DVD-приставках. Такое устройство имеет вполне достаточную мощность для функционирования на частоте, достигающей 10 МГц.
В состав приемника входит:
- фотодиод;
- усилитель.
В состав усилителя входит полевой транзистор, специальная микросхема. Когда увеличивается расстояние, происходит падение освещенности фотодиода. Поэтому необходимо иметь мощное усиление. Собираемая схема позволяет достичь 4000 единиц.
Когда увеличивается частота, начинают уменьшаться сигналы фотодиода. Усилитель подобной конструкции является главной и сильно уязвимой частью. Его настройка требует очень высокой точности. Желательно отрегулировать коэффициент усиления таким образом, чтобы получать максимальные значения. Самым простым способом будет подача на транзистор 3 В. Можно установить обыкновенную батарейку.
Чтобы приемник начал работать, необходимо подать 12 В. Для этого устанавливается специальный блок питания.
У такого усилителя высокая чувствительность к любым наводкам, поэтому его нужно обязательно экранировать. Можно для этого воспользоваться корпусом оптического датчика. Экранирование фотодиода можно сделать из обычной фольги.
Описанная выше система позволит создать самодельный лазерный дальномер в бытовых условиях.
В статье я расскажу о том, как я делал лазерный дальномер и о принципе его работы. Сразу отмечу, что конструкция представляет собой макет, и ее нельзя использовать для практического применения. Делалась она только для того, чтобы убедится в том, что фазовый дальномер реально собрать самому.
Теория
Часто приходится встречать мнение, что с помощью лазера расстояние измеряют только путем прямого измерения времени «полета» лазерного импульса от лазера до отражающего объекта и обратно. На самом деле, этот метод (его называют импульсным или времяпролетным, TOF) применяют в основном в тех случаях, когда расстояния до нужного объекта достаточно велики (>100м). Так как скорость света очень велика, то за один импульс лазера достаточно сложно с большой точностью измерить время пролета света, и следовательно, расстояние. Свет проходит 1 метр примерно за 3.3 нс, так что точность измерения времени должна быть наносекундная, хотя точность измерения расстояния при этом все равно будет составлять десятки сантиметров. Для измерения временных интервалов с такой точностью используют ПЛИС и специализированные микросхемы.Видео работы дальномера:
Дальность работы у получившегося дальномера вышла достаточно небольшая: 1,5-2 м в зависимости от коэффициента отражения объекта.
Для того, чтобы увеличить дальность, можно использовать специальный отражатель, на который нужно будет направлять луч лазера.
Для экспериментов я сделал линзовый отражатель, состоящий из линзы, в фокусе которой расположена матовая бумага. Такая конструкция отражает свет в ту же точку, откуда он был выпущен, правда, диаметр луча при этом увеличивается.
Фотография отражателя:
Использование отражателя:
Как видно, расстояние до отражателя - 6.4 метра (в реальности было примерно 6.3). Сигнал при этом возрастает настолько, что его приходится ослаблять, направляя луч лазера на край отражателя.
Точность получившегося дальномера - 1-2 сантиметра, что соответствует точности измерения сдвига фаз - 0,2-0,5 градуса. При этом, для достижения такой точности, данные приходится слишком долго усреднять - на одно измерение уходит 0.5 сек. Возможно, это связано с использованием PLL для формирования сигналов - у него довольно большой джиттер. Хотя я считаю, что для самодельного макета, аналоговая часть которого сделана довольно коряво, в котором присутствуют достаточно длинные провода, даже такая точность - довольно неплохо.
Отмечу, что я не смог найти в Интернете ни одного существующего проекта фазового дальномера (хотя бы со схемой конструкции), что и послужило причиной написать эту статью.
Теги:
- лазерный дальномер
- stm32
- stm32f4discovery
Bruno Gavand
Проект, в котором рассматривается простое и дешевое решение ультразвукового сенсора для измерения расстояния, выполнен на базе микроконтроллера PIC16F877A компании , но пользователями исходный код может быть адаптирован под другие микроконтроллеры. Сенсор может быть встроен в пользовательские разработки и устройства: детекторы присутствия, роботы, автомобильные системы парковки, устройства измерения расстояния и пр.
Отличительные особенности:
- небольшое количество внешних компонентов;
- размер кода 200 Байт;
- диапазон рабочих расстояний: 30 см - 200 см;
- точность измерений ±1 см;
- индикация при выходе за пределы измерений.
Как известно, скорость звука в воздухе равна около 340 м/с. Таким образом, принцип ультразвукового сенсора состоит в посылке ультразвуковой импульса частотой 40 кГц и отслеживание отраженного сигнала (эхо). Конечно, звука вы не услышите, но ультразвуковой датчик способен определить отраженный импульс. Следовательно, зная время прохождения импульса и отраженного ультразвукового сигнала, мы сможем получить расстояние. Разделив на два, мы получим расстояние от ультразвукового датчика до первого препятствия, от которого был отражен сигнал.
В устройстве применен пьезокерамический ультразвуковой излучатель MA40B8S и пьезокерамический ультразвуковой датчик MA40B8R открытого типа. Основные параметры приведены в таблице ниже.
| Устройство | Назначение | Частота | Направленность, град |
Емкость, пФ |
Область детектирования, м |
Входное напряжение, макс, В |
| MA40B8S | Излучатель | 40 кГц | 50 (симметричный) | 2000 | 0.2 … 6 | 40 |
| MA40B8R | Датчик | 40 кГц | 50 (симметричный) | 2000 | 0.2 … 6 | — |
Для тестирования была применена отладочная платформа компании .

Однако пользователь может использовать любой микроконтроллер PIC, у которого имеется хотя бы один канал АЦП и один канал ШИМ.
Принципиальная схема ультразвукового сенсора
Управление излучателем осуществляется посредством транзистора BD135 . Диод 1N4007 служит для защиты транзистора от обратного напряжения. Благодаря использованию транзистора и резонансной цепочки, которая образована параллельным включением дросселя L1 330 мкГн и конденсатора, образованного самим излучателем, напряжение питания излучателя составит около 20 В, что обеспечивает дальность обнаружения до 200 см. Стоит заметить, что управлять излучателем возможно непосредственно с вывода микроконтроллера, однако в таком случае диапазон расстояний не превышает 50 см.
Датчик подключен непосредственно к АЦП микроконтроллера (при использовании PIC16F877A - канал 1 АЦП), резистор, включенный параллельно датчику, необходим для согласования импеданса.
Для начала необходимо послать ультразвуковой импульс. Сигнал с частотой 40 кГц легко получить с использованием аппаратного ШИМ микроконтроллера. Отраженный сигнал с датчика поступает в АЦП, разрешение АЦП составляет 4 мВ, что вполне достаточно для считывания данных с датчика, и дополнительные компоненты не нужны.
Внешний вид макетной платы ультразвукового сенсора


Этот сенсор - самое простое решение, и поэтому имеет несколько недостатков: небольшая вибрация ультразвукового приемника может привести к неправильным измерениям. Так как посылаемый импульс не модулирован и не кодирован, посторонние источники ультразвуковой частоты могут влиять на измерение, и все это может привести к неправильным результатам (выход за пределы измерений).

Надписи на изображении:
ultrasonic burst - ультразвуковой импульс;
mechanical echo (removed by software) - механическое эхо (исключается программно);
ultrasonic wave reflected by remote object - ультразвуковая волна, отраженная от удаленного объекта.
Цена деления осциллографа: по горизонтали - 1 мс/дел, по вертикали - 5 мВ/дел.
Механическое эхо исключается программно путем введения задержки. Отраженная волна, имеющая амплитуду около 40 мВ, получена через 9.5 мс после отправленного импульса. Учитывая, что скорость звука 340 м/с, получаем:
0.0095 / 2×340 = 1.615 м.
В реальности - это был потолок помещения на расстоянии от датчика 172 см, на ЖК дисплее, установленном на отладочной плате было отображено значение 170 см.
Загрузки
Исходный код к проекту на микроконтроллере PIC16F877A (компилятор mikroC) -
По случаю приобрел себе ультразвуковой дальномер HC-SR04. Девайс представляет из себя модуль с двумя пъезоизлучателями, один из которых служит излучателем, а второй - приемником ультразвуковой волны; плюс управляющая электроника для управления излучателем и приемником. Для подключения модуль имеет 4-х контактный разъем: два из которых питание (требуется 5 вольт), и еще два для общения с микроконтроллером.
Интерфейс связи тут организован очень просто: на вход подаем короткий умпульс длительностью 10-15 микросекунд и ждем импульса на выходе. Как только до приемника дойдет отраженная волна, модуль сам рассчитает расстояние и выдаст на ногу Echo импульс высокого уровня длинной до 25 мс. Длина выходного импульса будет пропорциональна расстоянию до препятствия от которого отразилась ультразвуковая волна. Нам остается только поймать этот импульс, посчитать его длину и перевести это значение в расстояние.


Технические характеристики:
- Напряжение питания: 5V
- Ток покоя: < 2 мА
- Эффективный угол обзора: < 15 °
- Диапазон расстояний: 2 см - 500 см
- Разрешение: 0,3 см
Характеристики потырены с документации на модуль . Кроме этого производитель приводит формулу, по которой рассчитывать расстояние в зависимости от длительности импульса.
S=F/58 ; где S - дистанция в сантиметрах, F - длина импульса в микросекундах
Как видно, даже знать скорость звука не обязательно.
Для испытаний собрал вот такую схему:

Модуль соединяется к микроконтроллеру напрямую. Резисторы подтяжки ставить не нужно, они уже есть на плате модуля.
И так, нам нужно ловить всего один импульс, и затем посчитать его длину. По началу хотел подбить под это дело одно из внешних прерываний микроконтроллера, при этом прерывание должно было происходить как по переднему фронту (переход с низкого в высокое состояние), так и по заднему фронту (с высокого на низкое). Тоесть придется на лету менять конфигурацию этого прерывания. Плюс к этому нужно задействовать один из таймеров, который должен измерять длину импульса. Слишком сложно для маленькой операции фиксирования сигнала.. В Bascom-AVR на этот случай есть специальная команда Pulsein . Вот пример того, как поймать сигнал с помощью этой команды:
Pulsein A , Pind , 5 , 1
Здесь, в переменную A запишется значение длины импульса в десятках микросекунд , снятого с ноги Pind.5 . Единица на конце команды говорит, что нужно ловить сигнал высокого уровня. Если изменить на 0, тогда контроллер будет ловить сигнал низкого уровня.
Эта команда не использует прерываний и хардверного таймера, но способна определить появление импульса и зафиксировать его длину с разрешением 10 мкс. Команда использует для хранения длины импульса 2-х байтный тип переменной, поэтому максимальная длина принятого сигнала может быть 655,35 мс. Этого вполне хватает для поставленной задачи, но по необходимости можно отредактировать файл библиотеки mcs.lib и изменить максимальную длительность фиксируемого импульса.
Полный листинг программы представлен ниже
$regfile = "m8def.dat"
$crystal = 8000000
"конфигурация подключения дисплея к портам МК
Config Lcd = 16 * 2
Config Lcdpin = Pin , Rs = Portc . 5 , E = Portc . 4 , Db4 = Portc . 3 , Db5 = Portc . 2 , Db6 = Portc . 1 , Db7 = Portc . 0
Config Portd . 4 = Output "выход для подключения ноги Trigger
Trigger Alias Portd . 4
Trigger = 0
Config Portd . 5 = Input "вход для импульса Echo
Config Portd . 7 = Output "конфигурация для подключения светодиода
Led Alias Portd . 7
Led = 0
Dim A As Word "сюда копируется значение длины сигнала
Dim S As Single "переменная для хранения расстояния
Const K = 0 . 1725 "коэффициент для перевода длины импульса в расстояние
Waitms 50
Cursor Off
Cls
Lcd "Sonar HC-SR04"
Locate 2 , 1
Lcd "сайт"
Led = 1
Waitms 100
Led = 0
Wait 3
Do
Trigger = 1 "даем импульс на ногу Portd.4 длительностью 15 мкс
Waitus 15
Trigger = 0
Waitus 10
Pulsein A , Pind , 5 , 1 "ловим импульс высокого уровня на PinD.5